Authors Ali Zolfagharian, Akif Kaynak, and Abbas Kouzani explore the growing science of soft robotics, outlining their findings in the recently published ‘Closed-loop 4D-printed soft robots.’ Emphasizing how fast this field is growing, the authors make it clear that many different levels of research and development are involved, from materials and modeling to performance control and more. 3D printing allows for great customization but in taking the process to the next dimension with 4D printing, researchers can add much greater functionality to robotics.
Closed loop 4D printing allows researchers to enhance soft robots with sensors, actuators, and controls for better performance overall. The authors integrated such details into their electronic innovations here, using a data-driven, machine-learning model meant to handle a new hierarchy of tasks to include:
- Grasping
- Sorting
- Climbing or crawling
- Inspecting
- Search and rescue
- Drug delivery systems
“Origami-like soft robots can provide variable stiffness with higher efficiency and dexterity required in specific tasks, which conventional robots cannot handle,” stated the researchers. “Closed-loop 4D-printed soft robots may be also used in autonomous surgeries, laparoscopy, and endoscopy.”
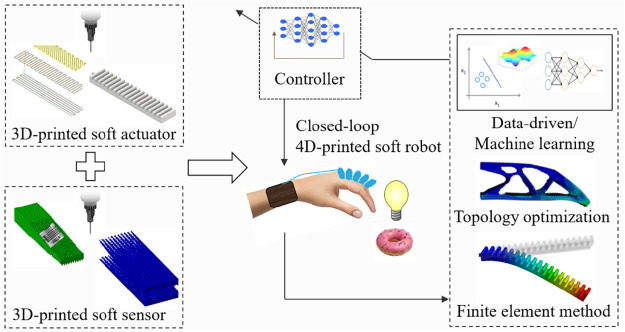
Diagram of closed-loop 4D-printed soft robot.
Machine learning plays an obvious—and substantial—role in 4D printed soft robots, alleviating some of the challenges involved in ‘diverse manipulation tasks.’ Machine learning can be used to develop such robotics during the manufacturing process, and algorithms can be used to speed up property optimization like viscosity and orientation of parts.
“Through the integration of physical models, the ML uses sparse datasets in a statistical learning framework to predict materials and 3D printing processing parameters to increase 3D printing speed and fidelity,” stated the researchers.
With 3D printing, the following features can be introduced:
- Targeted anisotropy
- Variable stiffness
- Spatially heterogeneous mechanical strengths
The use of machine learning is advantageous for this area of robotics, offering increased dimension and more, with a variety of control mechanisms available: open-loop controllers, closed-loop (with embedded soft sensors), and more.
“The mechanisms and materials used in the construction of soft robots are similar; hence, the control can be inspired by a learning strategy that deals with high nonlinearity and agility,” explain the researchers.
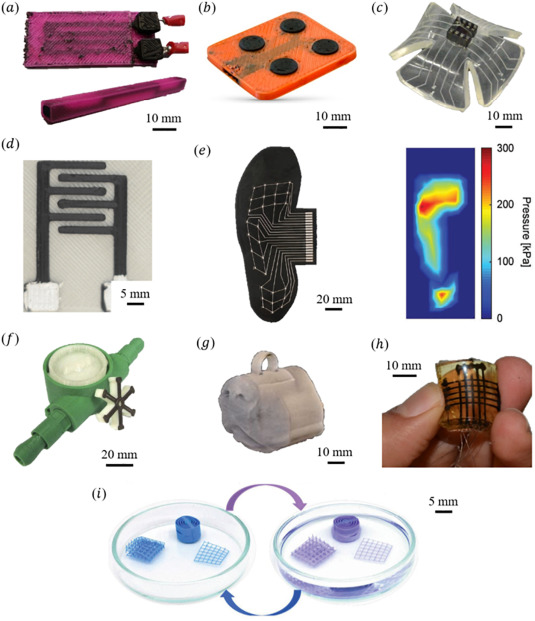
3D-printed sensors with applications in 4D-printed soft robots. (a) 3D-printed integrated strain sensor (reproduced with permission from Copernicus Publications on behalf of AMA [42]); (b) 3D-printed sEMG electrodes (reproduced with permission from Copernicus Publications on behalf of AMA [42]); (c) 3D-printed piezoelectric sensor in jellyfish soft robot (reproduced with permission from SPIE [67]); (d) 3D-printed e-tongue sensor (reproduced with permission from Frontiers [110]); (e) 3D-printed pressure sensors (reproduced with permission from John Willey and Sons [71]); (f) 3D-printed fluid flow rate sensor (reproduced with permission from IOP Publishing [98]). (g) 3D-printed dog nose for gas detection (reproduced with permission from Nature Publishing Group [109]); (h) 3D-printed flexible tactile sensor (reproduced with permission from Springer [58]); (i) 3D-printed thermochromic and solvatochromic sensors (reproduced with permission from John Wiley and Sons [100]).
“Despite existing problems, 4D-printed soft robots are achievable through the integration of 3D-printed soft sensors and actuators with machine learning algorithms and FEM,” concluded the researchers. “Integrated 3D-printed actuators and sensors are feasible but limited by the nature of materials utilized. The future of enhancing closed-loop 4D-printed soft robots accordingly relies on integration of suitable materials, machine learning approaches and control algorithms.”
Soft robotics continue to be increased subject of research, from new designs and frameworks to continued customizations and different materials. What do you think of this news? Let us know your thoughts; join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
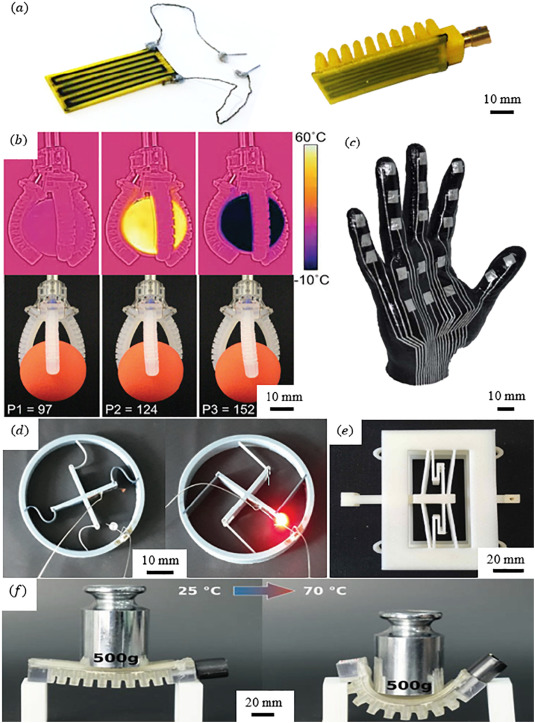
Integrated 3D-printed soft sensors and actuators: (a) 3D-printed embedded sensor in pneumatic soft actuator (reproduced with permission from SPIE [126]); (b) 3D-printed soft gripper with printed embedded sensors (reproduced with permission from John Wiley and Sons [9]); (c) 3D-printed tactile sensor on 3D-printed prosthetic hand (reproduced with permission from the American Chemical Society [34]); (d) 4D-printed multistable thermal actuator (reproduced with permission from John Wiley and Sons [150]); (e) Bistable 3D-printed soft actuator (reproduced with permission from MDPI [148]); (f) 3D-printed variable stiffness soft actuator with an integrated joule heating circuit (reproduced with permission from John Wiley and Sons [151]).