
Martin Vincent Bloedorn
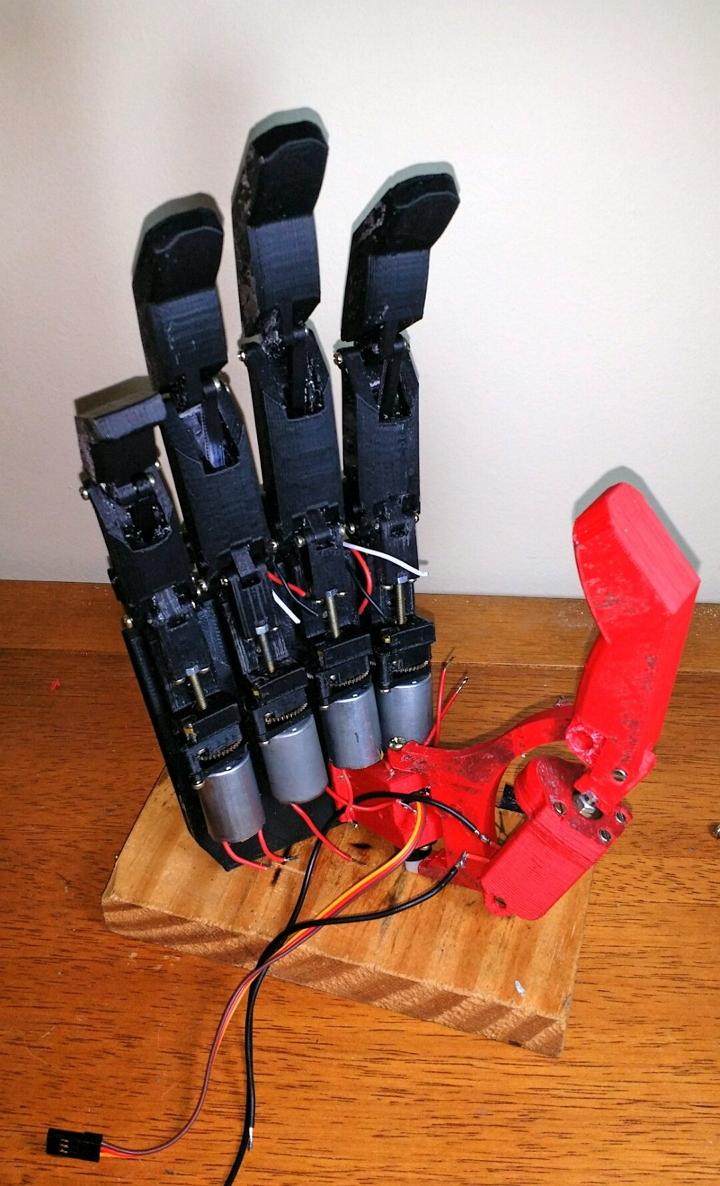
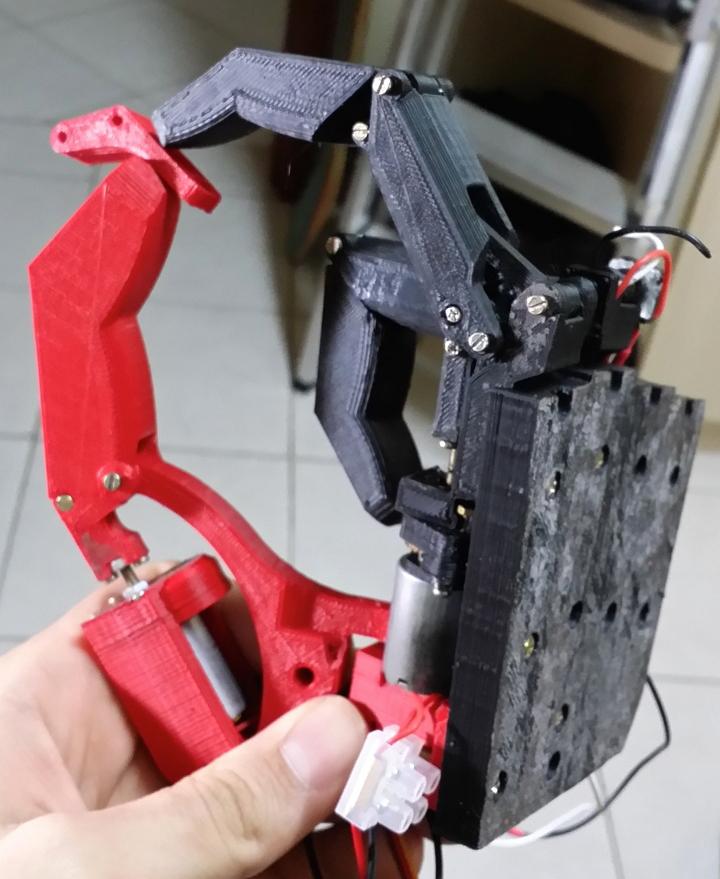
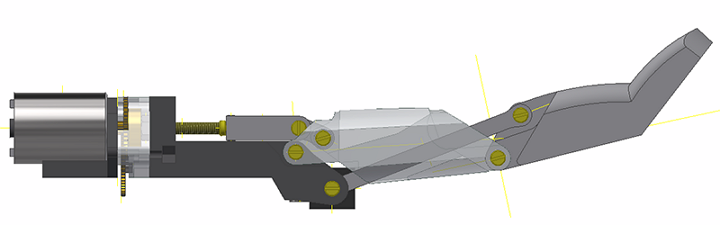
This project from Bloedorn qualifies as considerably more than “fiddling.” It’s a 3D printed prosthetic hand which in many ways functions just like a human hand, but it uses actuated motors with a linkage that drives each finger via a threaded rod.
The motor and drive screw alone are capable of lifting a couple of pounds, and Bloedorn’s design uses the servo motor’s potentiometer to create a feedback loop that uses the position of each finger to drive electronics.
Bloedorn says, despite the high level of sophistication of his device, the real key was to make certain the Biohand would be relatively inexpensive.
“I live in Brazil,” Bloedorn says. “Here – unfortunately – lots of components are expensive or hard to get. This constrained a lot of design choices. I tried my best to use solely open-source development tools (or, in worst cases, free-of-charge ones).”
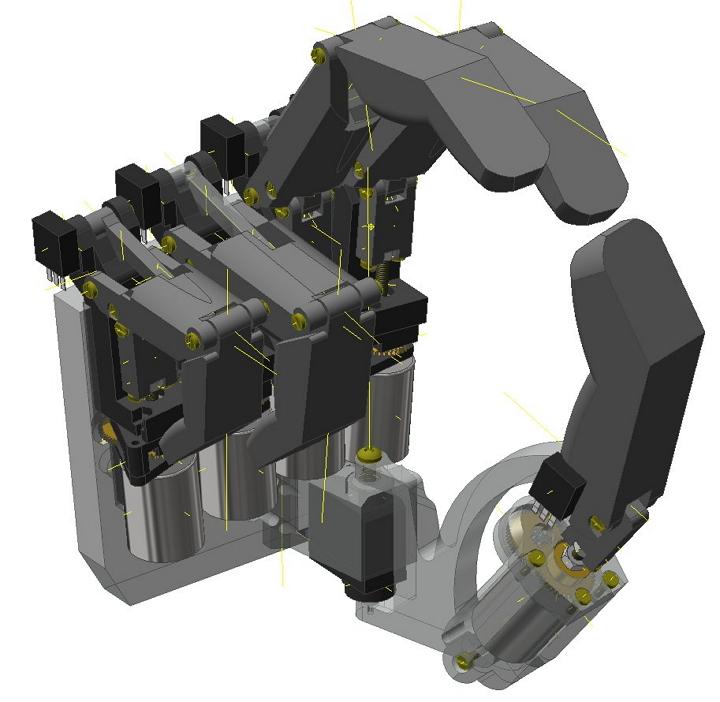
The selection of standard RC servo motors was made as Bloedorn says they can be picked up nearly anywhere in the world and a number of their internal parts are very similar across the full range of manufacturers. He says he used the DC motor and a pair of gears from a common metal RC servo to design his 3D printable linear actuator. It uses a standard, 25mm M3 piece as a “leadscrew” to drive the hand.
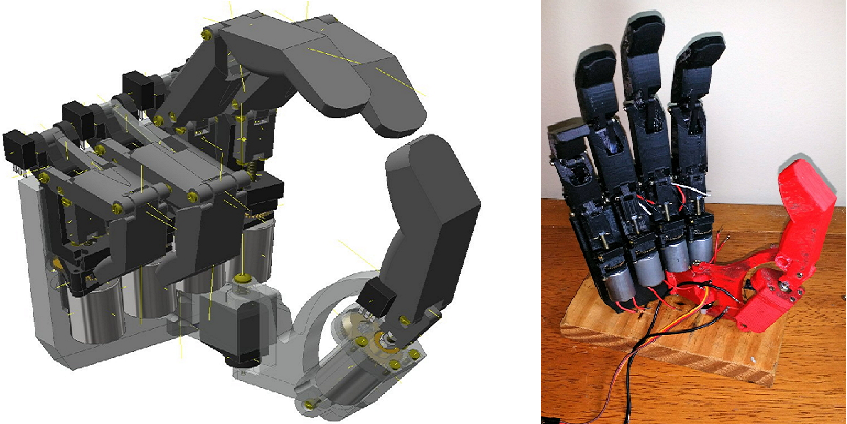
Bloedorn created all the mechanical designs for the Biohand in Autodesk Inventor. Though that’s not open-source software, he was okay with that choice as a 3-year Pro license is available for students.
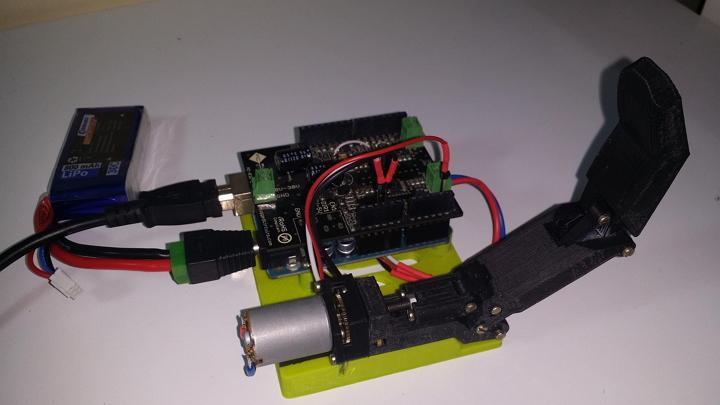
Bloedorn adds that though his current prototype lacks aesthetically pleasing covers, they’re on the way in a later iteration of the design.
You can check out the complete design documentation for the Biohand on Hackaday here, and Bloedorn adds that he plans to continue development of the project.
What do you think about this 3D printed, open-source, servo-driven prosthetic hand from Brazilian designer Martin Vincent Bloedorn? Let us know in the Open Source 3D Printed Biohand forum thread on 3DPB.com.