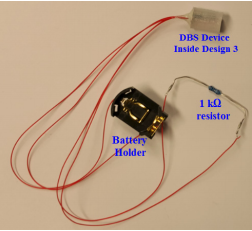
Deep brain stimulation (DBS) is a method for treating a variety of neurological disorders such as Multiple Sclerosis and Parkinson’s. In DBS treatment, electrical signals are delivered to a very specific region of the brain through an electrode attached to a microdevice. An area of primary concern in the continued development of these devices for DBS is the manner by which they can be made biocompatible. These devices are made up of components such as wires, a circuit board, resistors and capacitors, and coin-cell batteries and when implanted under the skin, the body recognizes these as non-native, harmful intrusions that should be repelled by its immune system’s defenses.
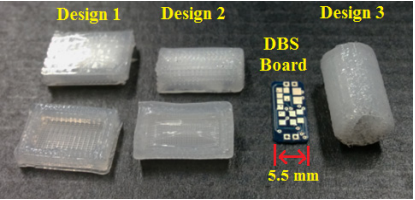
The difficulty in moving forward with its utilization as the primary method for the containment of DBS devices has been the methods by which it can be applied. The means by which a DBS device can be coated with silicone have been restricted to dipping or molding, although each method comes with its own weaknesses. Dipping the devices to create a silicone coating is a low-cost method for producing a small number of devices but coating formation cannot be sufficiently precisely controlled. Creating molds for the devices offers higher levels of control but also comes with a much higher price tag and the methods by which the molds are created requires a significant investment making it unsuitable for low-volume production.
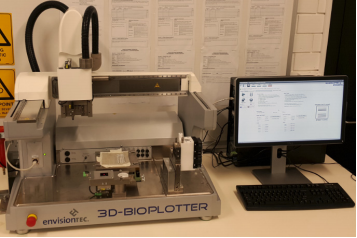
To test the viability of such an approach, the research team first designed the enclosures using SolidWorks and then sent the models to be printed on an EnvisionTEC GmbH 3D Bioplotter.
In their paper, they described the method by which this printer generates its physical output:
“Multiple materials [can be] inserted using syringes moving in three dimensions. Pressure is applied to the syringes, which then deposit a strand of materials for the length of movement and the time that the pressure is applied. Parallel strands are printed in one layer. For the following layer, the direction of the strands is turned to the centre of the object, creating a mesh with good mechanical properties and mathematically defined porosity. The features of the system include a 3-axis positioning system with high movement accuracy, cell printing with up to five types of cells per object, high flexibility in the choice of materials, fast printing speed, a large build volume, and flexible inner structure design.”
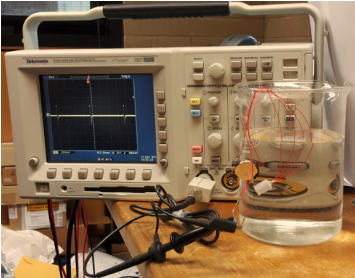
While there is a great deal more testing that needs to be done and more possibilities for refinement of the enclosure design, at the very least these initial experiments demonstrate the enormous potential that this method holds for the creation of biocompatible DBS devices.
You can review the paper here. Join the discussion of this research in the 3D Printed DBS Device Enclosures forum thread over at 3DPB.com.