


As we give up control on many things, it becomes a bit frightening, worrying that we may be losing our acumen for doing simple things like entering and remembering phone numbers–and sometimes even our own these days. But the idea of having electronics and robotic devices helping us to learn to do things better in mechanical tasks and detailed projects? Now that’s another matter–and one that is entirely positive, as it still forces us to interact and use our thinking caps.
Credit: Bristol University
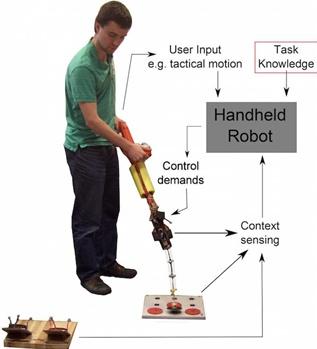
Items like computers, electronic devices, and robotics all boil down to functioning as one thing in the end: tools. Currently, Dr. Walterio Mayol-Cuevas and PhD student Austin Gregg-Smith, from The University of Bristol’s Department of Computer Science, are using digital design and 3D printing in an important and complex project which is actually meant to redesign the world of the handheld tool, while offering guidance to the user, correcting them in tasks where assistance is required for efficiency and accuracy.
The new devices, which are basically created digitally and created through 3D printed components, like the Handheld Robot Mark I and the next version, the Mark II, are capable of:
- Sensing
- Actuating
- Applying task knowledge
The researchers are taking some basic handheld tools and not only making them ‘smart’–as is the trend these days with everything being smart from phones to TVs to beds and cars–but also effectively making them into handheld robots that communicate with the user and redirect them when they are in the learning phase or veer off base.
What’s being created is a symbiotic relationship for the most part, as neither the tool nor the individual can function without the help of the other; however, the robots may ‘assert’ themselves when human error enters the picture.
“There are three basic levels of autonomy we are considering: no autonomy, semi-autonomous when the robot advises the user but does not act, and fully autonomous when the robot advises and acts even by correcting or refusing to perform incorrect user actions,” said Dr. Mayol-Cuevas.
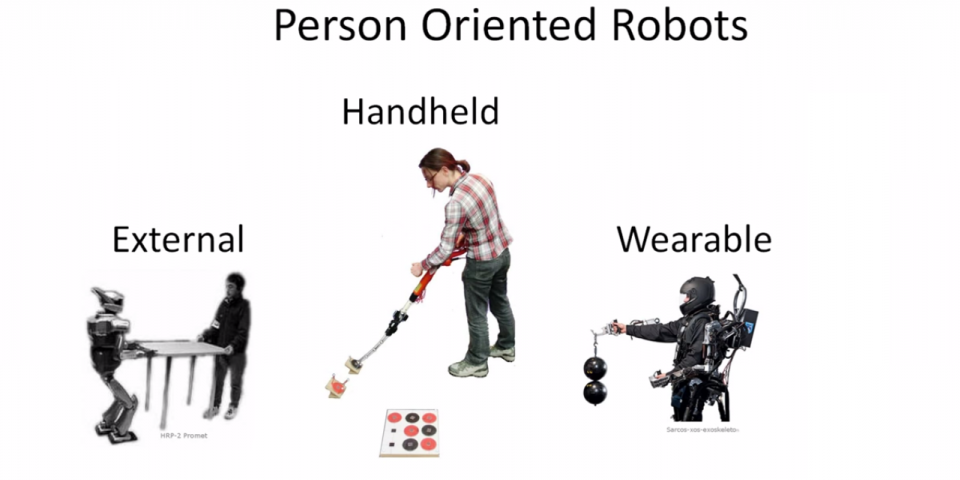
As the researchers discuss in their paper, ‘The Design and Evaluation of a Cooperative Handheld Robot,’ robots heretofore have always been either external and independent, or wearable and very close to the user, with good examples being a robotic exoskeleton or even a device such as a wheelchair, which the user is connected to.
What the researchers are working on is bridging the gap between external and wearable–with what they refer to as, logically, the tool space.
“The handheld tool space has been important through evolutionary history as a way to modify, adapt and shape the environment,” state Austin Gregg-Smith and Walterio W. Mayol-Cuevas in their paper. “Traditionally, it has enabled humans to increase their strength or accuracy beyond what limbs are capable of. Furthermore, tool use has been observed in several other species other than primates…”
“While it would be relatively easy to design both robot and task so that performance vastly surpasses any human…we are instead interested in using a tool that operates at about the same scales and speeds as conventional tools used in standard field tasks,” state Gregg-Smith and Mayol-Cuevas in their report. “This allows us to concentrate on the effect of various degrees of autonomy and cooperation without being distracted by cases where the operational superiority of the tool swamps human capability.”
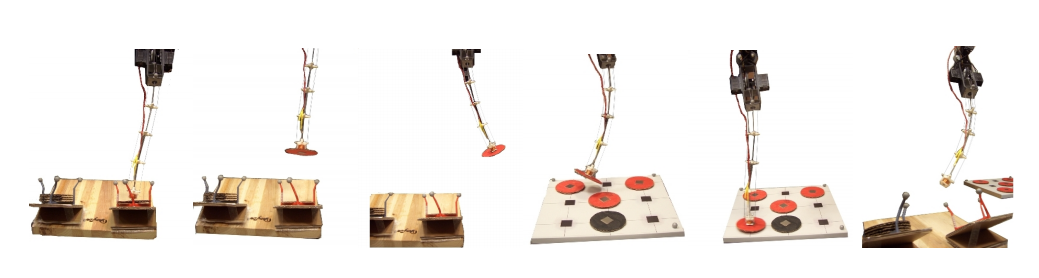
Tiling behaviour. From left to right: Tool picks a tile when the tip is in the vicinity; tile is removed by user motion; tool starts to point towards a valid drop zone; tool refuses to drop tile on incorrect location; tool drops tile; when all tiles of one colour are used, tool points to the other hopper. (From ‘The Design and Evaluation of a Cooperative Handheld Robot’)
With so many applications that the handheld robotics could be used for, the team is currently considering other ways their designs and 3D printed parts could work, interacting as tools for other field tasks.
Their designs are open-source with the full CAD designs available for download, including building instructions. Can you think of applications you would like to use handheld robotics for? Discuss in the Handheld 3D Printed Robots forum thread over at 3DPB.com.