Back in the early 1980s, the brilliant Reymond Clavel invented the delta robot.
Clavel, the director of the Laboratoire de Systèmes Robotiques 2 at the École Polytechnique Fédérale de Lausanne in Switzerland, is one of the pioneers in the development of parallel robots and the inventor of the delta robot. His work has resulted in 25 patents and the formation of no fewer than six startup companies.
There have been a whole genre of delta 3D printers created since then (some of them capable of creating enormous parts), but one inventor has outlined a new vision for how delta 3D printers might work.

Reymond Clavel, inventor of the delta robot
As van der Geest got deeper into his examination of the technology, he found what he saw as a major disadvantage with the delta design; the robots can only operate within a relatively small volume, and so the idea for a double or triple delta device came about.
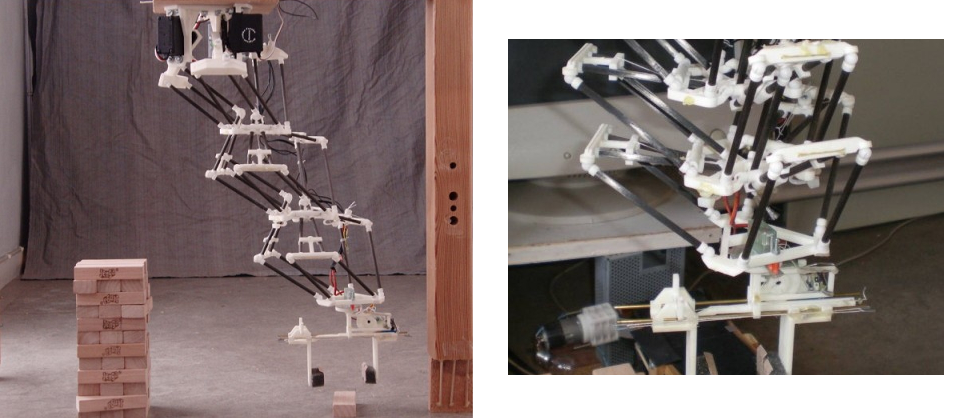
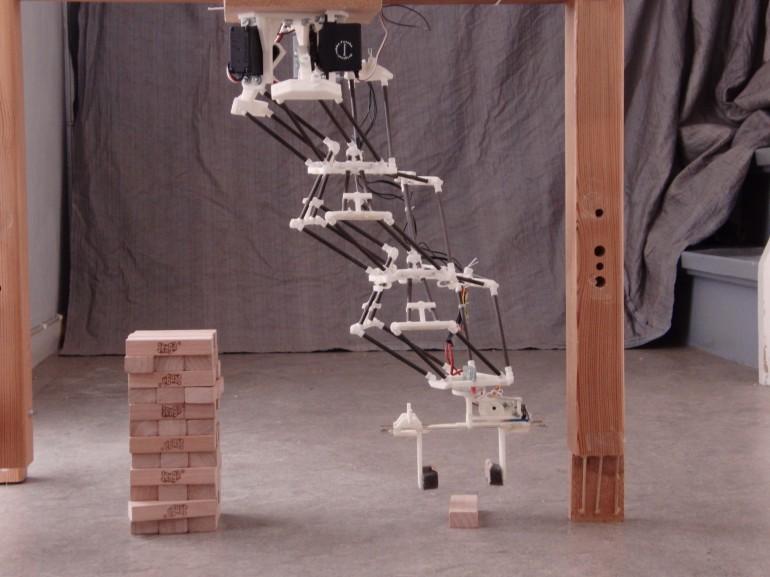
It’s a linkage of multiple delta robot segments. At the core, his idea is simple and elegant: it involves linking multiple delta arms together while leaving heavy control mechanisms and actuators attached to the base.

Because all the arms in the devices are connected to the end-effector, the result is a very stiff overall construction that doesn’t compromise weight and reduce work volume.
The inventor’s three working prototypes – one just 150 mm (6 in) long and the largest measuring more than 11 ft tall – use rotary actuators.
While van der Geest isn’t ready to announce the completion of any commercial deals for the idea, he does have lots of material which demonstrate how the systems work and their potential. Do you think a double or triple delta 3D printer based on Aad van der Geest’s design could work to make enormous parts? Let us know what you think on the Triple Delta Robot a 3D Printing Gamebreaker forum thread on 3DPB.com.