
Last spring, we heard about an intriguing research project out of Germany’s Hasso-Plattner Institute (HPI), called TrussFab. The integrated, end-to-end 3D software system made it possible to design sturdy, large-scale structures, and then determine the proper distribution of recycled plastic bottles and 3D printed connectors to fabricate a strong end product, like a bridge, that could hold human weight.
While these structures were pretty interesting, they were static, as in non-moving. But HPI has completed a new research project, called TrussFormer, that builds on TrussFab and uses hinges and linear actuators to add movement to the structures.
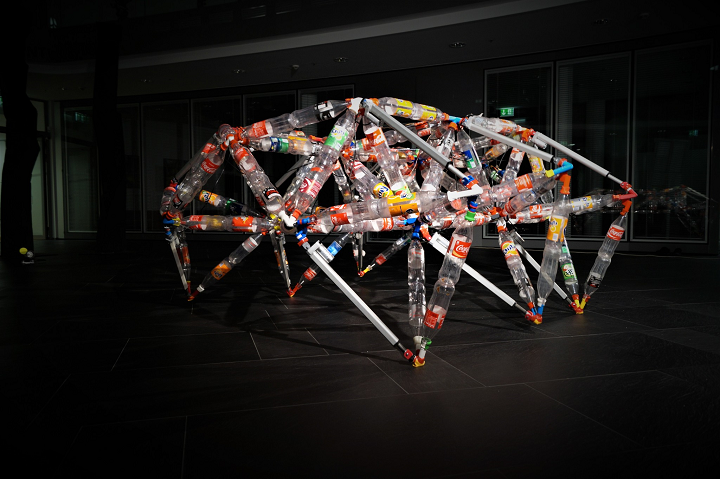
The abstract reads, “TrussFormer builds on TrussFab, from which it inherits the ability to create static large-scale truss structures from 3D printed connectors and PET bottles. TrussFormer adds movement to these structures by placing linear actuators into them: either manually, wrapped in reusable components called assets, or by demonstrating the intended movement. TrussFormer verifies that the resulting structure is mechanically sound and will withstand the dynamic forces resulting from the motion. To fabricate the design, TrussFormer generates the underlying hinge system that can be printed on standard desktop 3D printers. We demonstrate TrussFormer with several example objects, including a 6-legged walking robot and a 4m-tall animatronics dinosaur with 5 degrees of freedom.”

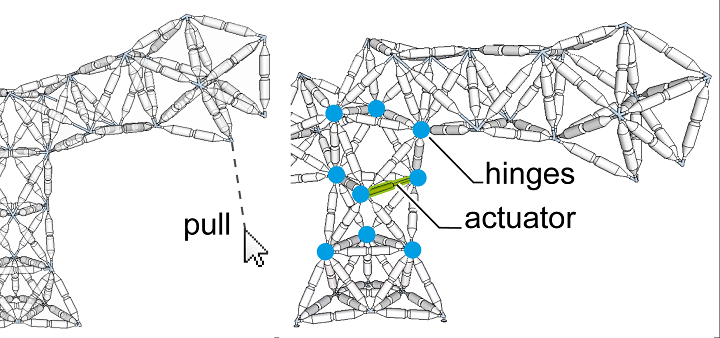
The system adds linear actuators into rigid truss structures, known as variable geometry trusses, to initiate organic movement, which means they hinge around several points at once. One example that illustrates this is a static tetrahedron that, when an edge is switched out with a linear actuator, becomes a moving structure. Rotation is possible by introducing connections, or hinges, at the nodes.
- Automated placement
- Placing elements with pre-defined motion; known as assets
- Manual placement
The first way is for beginners, while the third is for users actively acquiring engineering knowledge. In order to add movement through the ‘demonstrate movement’ tool, the T-rex head is pulled down; then, the system places an actuator that turns the body into a structure capable of bending down.
TrussFormer then verifies that the mechanism is structurally sound during a stability check across the structure’s various poses, so that users don’t produce invalid configurations.
“In the background, TrussFormer finds the safe range of expansion and contraction of the placed actuator by simulating the occurring forces in a range of positions,” the researchers explained on their HPI project page. “If there is a pose where the forces exceed the pre-determined breaking limits or the structure would tip over, TrussFormer sets the limits for the actuator so it will not extend beyond them.”
Once the animation pane is opened in the software’s toolbar, sliders can be used to manually control and try out the structure’s movement. Once the desired pose is found, users can add it to the animation timeline as a keyframe. This allows TrussFormer users to orchestrate how all of the actuators move with just a simple timeline and editor: for instance, a feeding behavior, where the T-rex opens its mouth, leans down, and waves its tail, can be easily programmed.

The ‘fabricate’ button is pushed once users are satisfied with the design’s structure, movement, and animation. This will then start the hinge generation algorithm, which analyzes the motion of the structure and generates the correct geometries for 3D printable hubs and hinges; these come with imprinted IDs for easy assembly. For the T-rex, 42 hubs, with 135 hinging pieces, are exported.
The software exports the animation patterns as Arduino code, and finally outputs a specification file with the speed, motion range, and force of the actuators so users can “achieve the desired animation pattern.”
“TrussFormer helps users in the 3 main steps along the design process,” the researchers conclude. “(1) It enables users to animate large truss structures by adding linear actuators to them. It offers three tools for this purpose: manual actuator placement, placement of assets performing predefined motion, and creating motion by demonstration. (2) TrussFormer validates the design in real time against static forces, static forces across all poses, and dynamic forces. (3) TrussFormer automatically generates the necessary 3D printable hinges for fabricating the structure. Its algorithm determines the placement and configuration of the hinges and their exact dimensions.”

Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
[Images: Hasso-Plattner Institute]