There are over 1,000 neurological disorders that have been identified to date. These include afflictions such as Huntington’s, muscular dystrophy, Parkinson’s, and epilepsy to name a few of the most well known. Any malfunction of a part of the nervous system, made up of the brain, spinal cord, and nerves, is classified as a neurologic disease and extensive research has been dedicated to understanding the best ways to treat and eliminate, if not the disorder, than at least its symptoms.
According the Brain Institute at Oregon Health & Science University, one in three people will have a brain or nervous system disorder at some point in their lives. More than 50 million people are diagnosed each year. Of that number, approximately 2.2 million American patients have what is termed a “treatment-resistant” disease that requires surgical intervention.
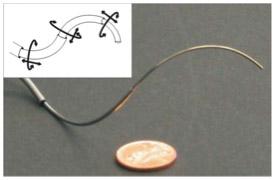
Shape memory alloy nestable needles for MRI surgery.
The needle-based interventions take place while the patient is inside of an MRI and require that the surgeon be able to see the needle as it approaches the target and its position in relation to the untreated tissue surrounding it. Because of the tight fit of the MRI (the opening generally being 60 cm) surgeons need a particularly compact robot to help guide the procedure.
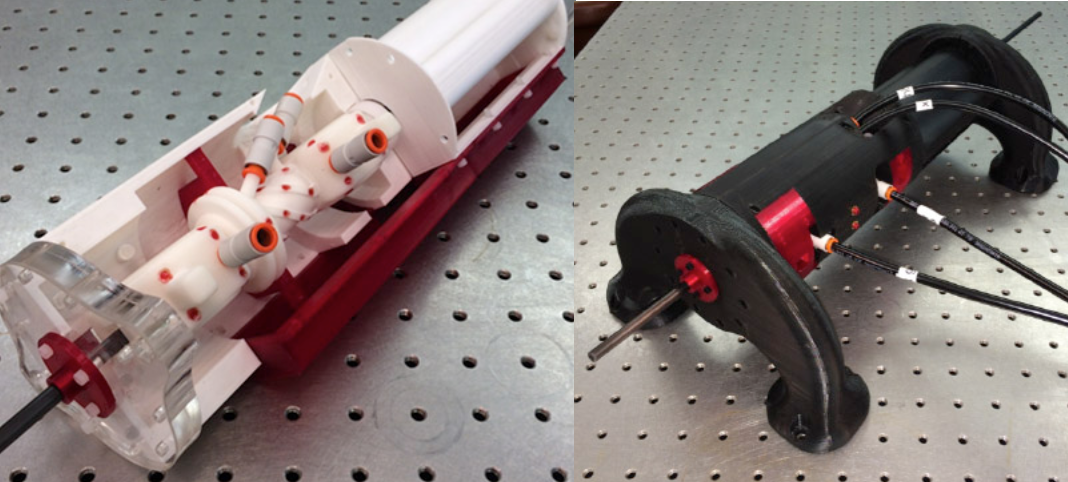
A team of research engineers from the Milwaukee School of Engineering and Vanderbilt University have worked to advance the possibilities for a pneumatic actuator that would provide the robot’s functionality. Pneumatic actuation is the most desirable method for the robot because it can work in the environment created by the MRI which has a strong magnetic field and radiofrequency pulses that would derail a DC motor. In addition to being compatible with the environment of the MRI, the actuator must be sterilizable and intrinsically safe, something that no other pneumatic actuator currently commercially available could provide.
The robot itself is made up of a series of steerable needles in nested tubes that can be telescopically extended. In addition, each tube is created from shape-memory alloy giving the needle the ability to bend in a controllable manner in response to manipulations of the tube bases.

The majority of the other components for the highly developed prototype were created on a Makerbot Replicator 2 using fused deposition modeling. The use of 3D printing to create this surgical tool means that it would be both a cost and time efficient way to create the needed component anew for each surgery. Initial tests show the bellows design to be quite promising and although further refinement will surely be needed, once again 3D printing is opening up avenues for health interventions that will improve the quality of care and the quality of life.
Discuss this story in the 3D Printed Pneumatic Actuator forum thread on 3DPB.com.