
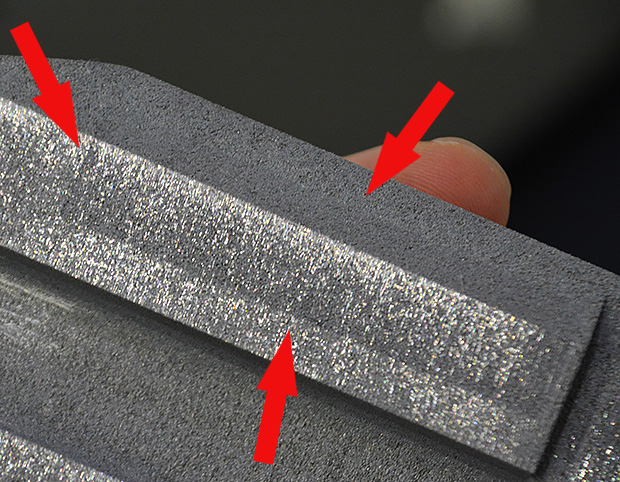
The 3D printed metal offers varying levels of permeability that enable the ‘sweating’ concept. [Image: JSK Lab/University of Tokyo]
The team is from JSK Lab at the University of Tokyo. Led by Professor Masayuki Inaba, they have created Kengoro as their third robot, with Kojiro and Kenshiro preceding him. The bio-inspired machine boasts 108 motors, along with a variety of circuit boards, gears, and more. With so many components, the research team was forced to innovate in terms of a cooling mechanism simply due to a lack of room. They chose to look at the 3D printed metal frame of the robot as its ‘skeleton’ and sought a way to make a much more creative cooling system than ever seen before. And it’s the 3D printed element that allows for this sweating mechanism to begin with, due to the varying levels of permeability allowed in the metal material working as microchannels for the fluid (water) to act as sweat when things get hot—ultimately cooling off Kengoro.
[Image: JSK Lab/University of Tokyo]
“Usually the frame of a robot is only used to support forces,” lead author Toyotaka Kozuki said in a recent interview. “Our concept was adding more functions to the frame, using it to transfer water, release heat, and at the same time support forces.”
As you can see from the images and the video below, Kengoro is definitely operating on a much different level from the robots we’re using to seeing. He can do push-ups continuously for 11 minutes with this new cooling system which the researchers state is three times better than traditional air cooling. Just one cup of deionized water is enough to keep him cooled for half a day.
[Screenshot from video provided by JSK Lab/University of Tokyo]
