![]()
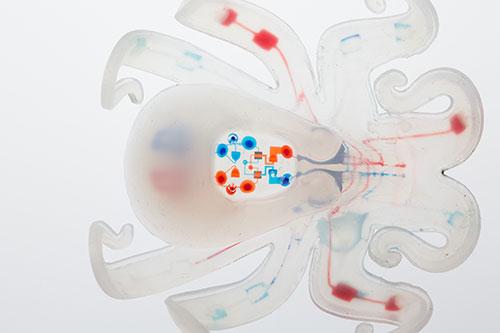
Soft-bodied robots have been produced before, but the obstacle was always in getting them to move without either being tethered to an external control system or outfitted with hard batteries or electronics. Harvard’s partially 3D printed “octobot” requires neither, thanks to a pneumatic system developed by a research team led by Robert J. Wood and Jennifer A. Lewis of Harvard’s Wyss Institute for Biologically Inspired Engineering and John A. Paulson School for Engineering and Applied Sciences (SEAS).The study, entitled “An integrated design and fabrication strategy for entirely soft, autonomous robots,” was published yesterday in Nature.
“One long-standing vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together,” said Wood, Charles River Professor of Engineering and Applied Sciences. “This research demonstrates that we can easily manufacture the key components of a simple, entirely soft robot, which lays the foundation for more complex designs.”


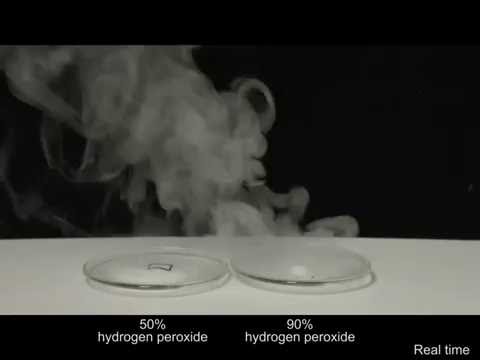
“Fuel sources for soft robots have always relied on some type of rigid components,” said Michael Wehner, a postdoctoral fellow in Wood’s lab and co-first author of the study. “The wonderful thing about hydrogen peroxide is that a simple reaction between the chemical and a catalyst — in this case platinum — allows us to replace rigid power sources.”
Below, you can see a demonstration of hydrogen peroxide reacting to a catalyst to create a flow of gas. Note that the researchers had to limit the concentration of hydrogen peroxide to 50% – a higher concentration combusts when activated.
The soft polymer octobot was created with a combination of three fabrication methods: soft lithography, molding and 3D printing. According to the research team, it’s actually quite a simple process, meaning that they can produce the bots quickly and continue to develop and experiment with them.
“Through our hybrid assembly approach, we were able to 3D print each of the functional components required within the soft robot body, including the fuel storage, power and actuation, in a rapid manner,” said Lewis, an expert on advanced 3D printing technology. “The octobot is a simple embodiment designed to demonstrate our integrated design and additive fabrication strategy for embedding autonomous functionality.”
“This research is a proof of concept,” said Ryan L. Truby, a graduate student in Lewis’ lab and co-first author on the study. “We hope that our approach for creating autonomous soft robots inspires roboticists, material scientists and researchers focused on advanced manufacturing.”
Additional authors of the study include Daniel J. Fitzgerald and Bobak Mosadegh. Below, you can see the octobot in action. Discuss further in the 3D Printed Octobot forum over at 3DPB.com.
