ROBOPuppet, The 3D Printed Robotics Controller Unveiled by Indiana University Researchers

 As we enter the latter part of the decade, two technologies which will play vital roles in the future of manufacturing and worldwide economies in general, are robotics and 3D printing. The exponential rise and subsequent convergence of these technologies make it nearly impossible to predict just where they will take us when you get past a 10 year time horizon. One research project, however, may foreshadow a possible way in which both 3D printing and robotics converge to offer a more intuitive interface for automation or teleoperation.
As we enter the latter part of the decade, two technologies which will play vital roles in the future of manufacturing and worldwide economies in general, are robotics and 3D printing. The exponential rise and subsequent convergence of these technologies make it nearly impossible to predict just where they will take us when you get past a 10 year time horizon. One research project, however, may foreshadow a possible way in which both 3D printing and robotics converge to offer a more intuitive interface for automation or teleoperation.
Researchers at Indiana University, led by Anna Eilering, Giulia Franchi and Kris Hauser have created an affordable way to intuitively control a variety of different types of robots, with a 3D printable arm, called the ROBOPuppet. Currently, teleoperations of robotic devices have many important uses. Whether it’s dealing with dangerous elements within a nuclear facility, search and rescue, removal or testing of possible explosive devices or robotic surgeries, the number of applicable uses for such technology only continues to expand.
Current robotic operation interfaces include joystick or keypad-like controllers, which can oftentimes be confusing, less precise, and unable to translate a user’s desired actions onto the target robot properly. This is where the researchers believe they have come up with a solution.
If you follow the robotics industry at all, you have probably heard of Baxter, from Rethink Robotics. Baxter is an industrial robot which allows the user to program its movements by physically moving the arms of the machine to desired locations. This is what has made Baxter such an incredible success, the ability to easily program movements without needing a background in programming or robotics operation.
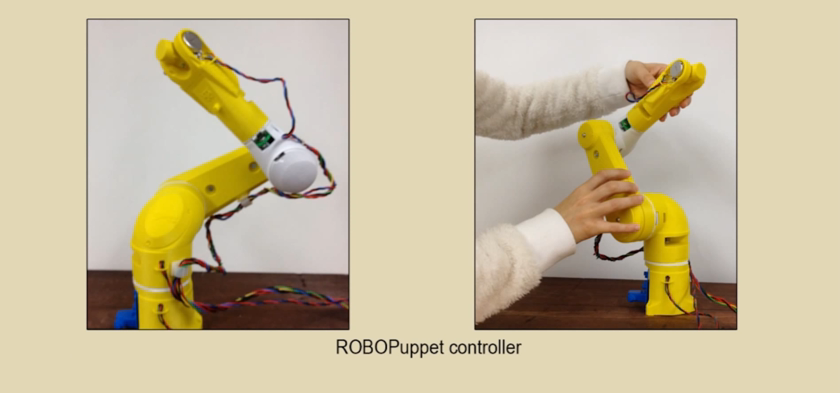
The ROBOPuppet is basically a real-time version of Baxter, which can be customized for a variety of different robots via 3D printing. The example used by the researchers was for the control of a Staubli TX90L 6DOF. The controller is about 30% the size of the actual robotic arm, 3D printed to look like a miniature version of the actual machine. In the example provided, it took researchers approximately 35 hours to build the ROBOPuppet controller, 29 of which was for 3D printing the parts needed on a MakerBot Replicator 2 machine. The total estimated cost of the example ROBOPuppet shown, is approximately $85, of which a majority of the price is attributed to its Arduino UNO microcontroller.
The adaptability of this concept, however, is qute amazing. The fact that the body of the ROBOPuppet can be 3D printed on a desktop 3D printer like the MakerBot Replicator means it can provide anyone, even those at home, the ability to create their own ROBOPuppet suited for almost any robot they desire.
The project website provides a detailed list of instructions on creating your own ROBOPuppet using software like FreeCAD and TinkerCAD, affordable hardware, and a bit of skill.
- Download the CAD model for the target robot
- Inspect each joint surface to be articulated – use these observations to determine the final size of the puppet
- Create a watertight mesh from the CAD model, scaled to the predetermined size.
- Using pocket geometries, modify the robot’s mesh to allow the installation of the joint encoder assemblies as well as access for any additional hardware.
- Print the puppet
- Clean the printed model and trim any overhand, rafts or support structures.
- Install joint controller assemblies.
- Assemble puppet
- Install friction control bolts
- Run wiring and hook everything up
- Test encoders and assembly.
Let us know if you have taken on this project in the ROBOPuppet forum thread on 3DPB.com. Below are a couple demonstration videos provided by Indiana University.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Precision at the Microscale: UK Researchers Advance Medical Devices with BMF’s 3D Printing Tech
University of Nottingham researchers are using Boston Micro Fabrication‘s (BMF) 3D printing technology to develop medical devices that improve compatibility with human tissue. Funded by a UK grant, this project...
3D Printing Webinar and Event Roundup: April 21, 2024
It’s another busy week of webinars and events, starting with Hannover Messe in Germany and continuing with Metalcasting Congress, Chinaplas, TechBlick’s Innovation Festival, and more. Stratasys continues its advanced training...
3D Printing Webinar and Event Roundup: March 17, 2024
It’s another busy week of webinars and events, including SALMED 2024 and AM Forum in Berlin. Stratasys continues its in-person training and is offering two webinars, ASTM is holding a...
3D Printed Micro Antenna is 15% Smaller and 6X Lighter
Horizon Microtechnologies has achieved success in creating a high-frequency D-Band horn antenna through micro 3D printing. However, this achievement did not rely solely on 3D printing; it involved a combination...